Like your arm, but on a robot. It might not be shaped like your arm. There are a lot of types.

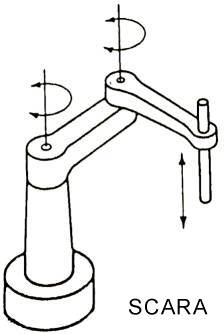 SCARA
(Selective Compliance Articulated Robot Arm.) robot: Like a cylindrical robot,
but instead of a slide, it has an elbow joint going out to the side. Put
the top of an articulated arm, turned on its side, on a cylindrical base.
They sometimes have two elbow joints, one left, one right, connected together
at the end. These are becoming very popular.
SCARA
(Selective Compliance Articulated Robot Arm.) robot: Like a cylindrical robot,
but instead of a slide, it has an elbow joint going out to the side. Put
the top of an articulated arm, turned on its side, on a cylindrical base.
They sometimes have two elbow joints, one left, one right, connected together
at the end. These are becoming very popular.
See also:
| file: /Techref/robot/arms.htm, 4KB, , updated: 2023/6/11 20:03, local time: 2025/10/18 13:01,
216.73.216.53,10-2-207-162:LOG IN
|
| ©2025 These pages are served without commercial sponsorship. (No popup ads, etc...).Bandwidth abuse increases hosting cost forcing sponsorship or shutdown. This server aggressively defends against automated copying for any reason including offline viewing, duplication, etc... Please respect this requirement and DO NOT RIP THIS SITE. Questions? <A HREF="http://techref.massmind.org/techref/robot/arms.htm"> Robotic Arms</A> |
| Did you find what you needed? |
Welcome to massmind.org! |
Welcome to techref.massmind.org! |
.